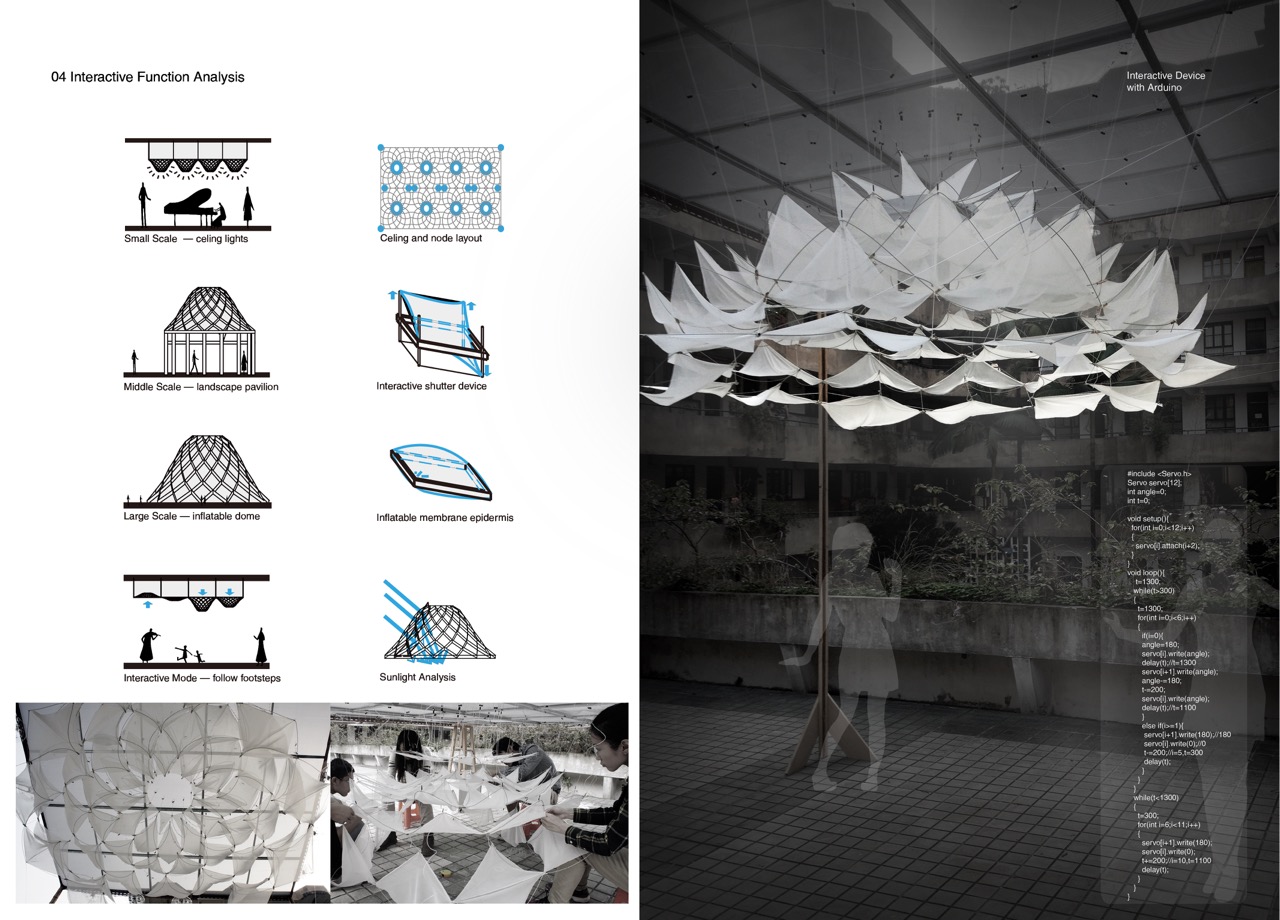
In the study of Smart Homes, the human-centered interaction in architecture was improved to a more intelligent level. One example is an interactive device project to construct a ceiling that adjusts shapes according to different sounds.
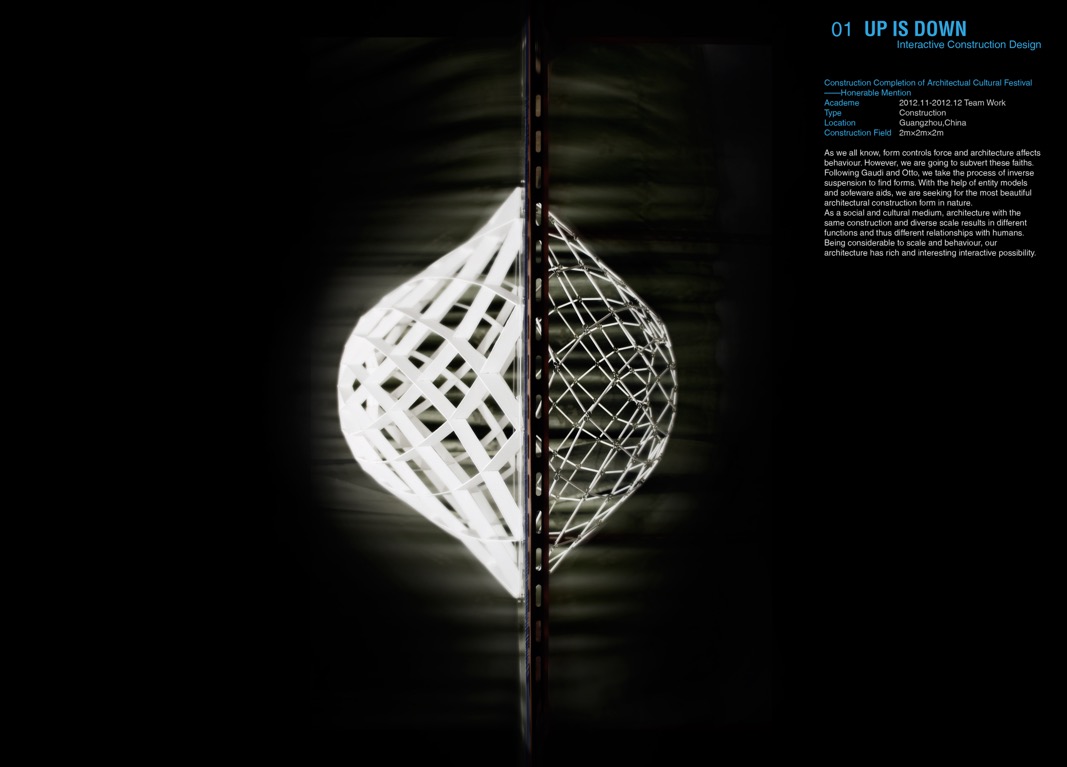
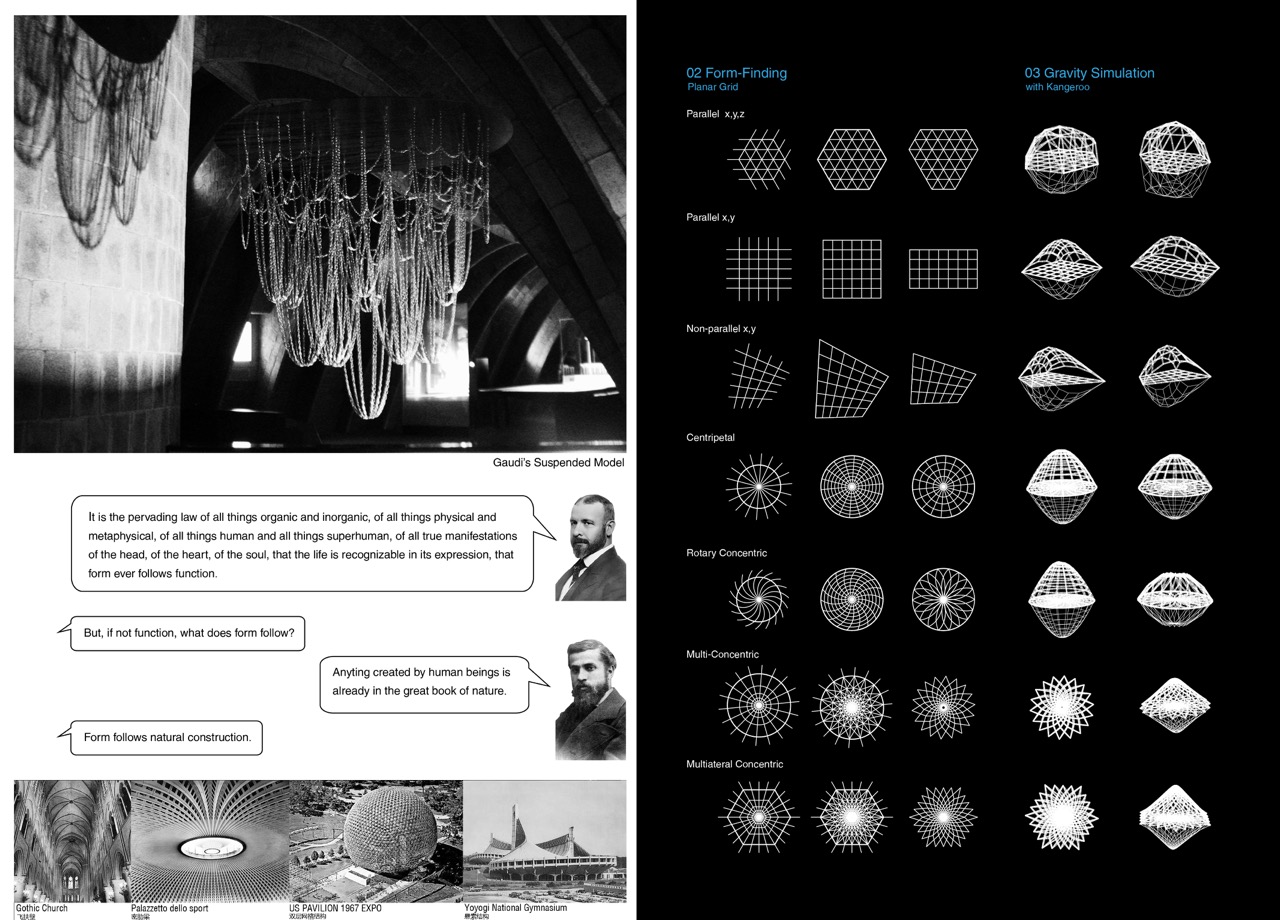
As we all know, form controls force and architecture affects behavior. However, we are going to subvert these faiths. Following Gaudi and Otto, we take the process of inverse suspension to find forms. After having conducted the interaction analysis to study users’ preference, we found out that the ceiling membrane going up and down was the most attractive movement in nature.
As a social and cultural medium, architecture with the same construction and diverse scale results in different functions and thus different relationships with humans. Being considerable to scale and behavior, our architecture has rich and interesting interactive possibility. After comparison, we decided to construct an interactive ceiling. To compute a realistic physics-based deformation, we utilized Kangaroo Physics Engine to compute membrane deformation under the gravity.
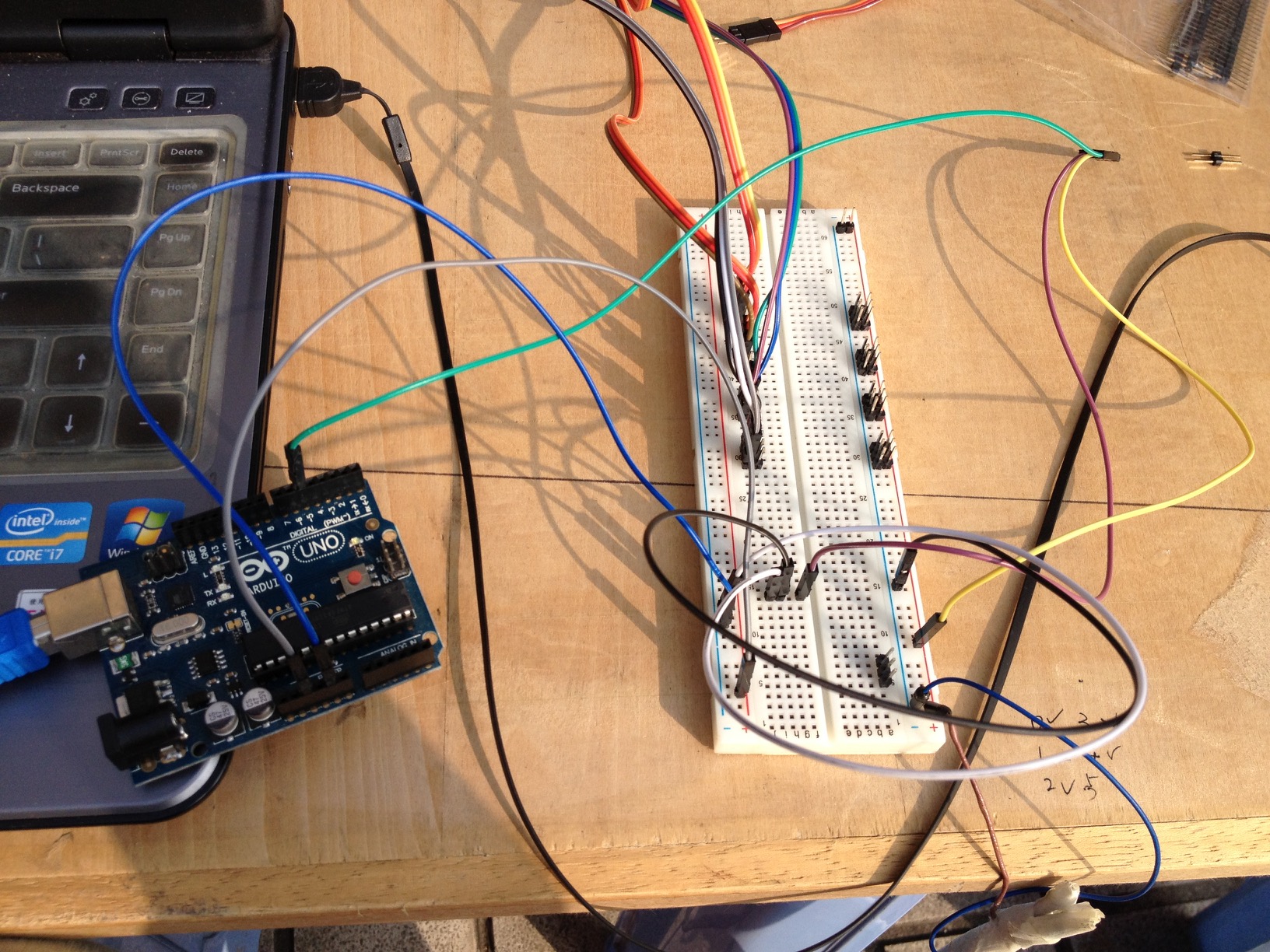
I was mainly responsible for developing a system using Arduino (an open-source single-board microcontroller to build interactive objects or environments). I wrote JAVA in Arduino IDE to implement a software. It processes data collected by acoustic sensor and controls servos to drive membrane to change shape with different electrical signals. Then I assembled circuit board, servos, and test the program. Through the whole process, I collaborated with team members to integrate the digital technologies into the smart ceiling. Ideas were shared and stormed, and I realized a good designer should have a substantial empathy for users, interdisciplinary knowledge, and great collaboration skills.
The control system contains two major modules. The sensor module was a sound classifier that identified acoustic types, such as footsteps and the human voice, based on frequency and pattern recognition. The controller module then drove the rotation of servos, based on the sound types identified by the sensor module.